 |
 |
近年,燃料の枯渇問題や環境問題等の観点から「再生可能エネルギー」の重要性が高まっている。本研究室では「海洋再生可能エネルギー」を中心に自然エネルギーを利用した発電方法について日夜研究を行っている。 |
|
|
近年,燃料の枯渇問題や環境問題等の観点から「再生可能エネルギー」の重要性が高まっている。本研究室では「海洋再生可能エネルギー」を中心に自然エネルギーを利用した発電方法について日夜研究を行っている。 |
・・・・・・・・・・・・・・・・(1)式
本研究室では、環境負荷の少ない小型風力発電装置として、高トルク型の6枚翼で始動し、始動後効率の良い3枚翼へと変形する可変翼枚数風力発電装置の研究を行っている。本システムは小型ながら出力効率40%という高効率運転が可能であるが、これを維持するためには運転状況にあわせた最適な負荷を与える必要がある。そこで本研究では可変翼枚数風力発電装置の最大電力を追従することのできる制御方法を提案し、これを実現することのできる制御装置の開発を行う。
・・・・・・・・・・・・・・・・(2)式
但し、K:本風車の定数、ωt:ロータの機械角速度、R:制動係数、Gloss:ギヤによる損失、Ra:電機子抵抗、Va:電機子電圧。
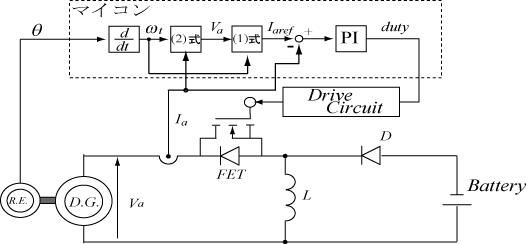
以上が本システムの制御に必要な方程式であり、検出したIaが(1)式より得られるIarefと等しくなるように負荷を調整することができれば、本システムの最大電力を追従することが可能となる。図1に本風力発電装置の最大電力追従制御の構成を示す。図示のような昇降圧チョッパ回路を本システムの負荷調整装置として採用しIa=Iarefとなるduty比をチョッパ回路のFETに与えることにより、風車の負荷を常に最適な値に保つことができるのである。
本制御装置の有用性を確認するために、最大電力追従制御装置を負荷に有する可変翼枚数風力発電装置の過渡応答特性解析を行った。
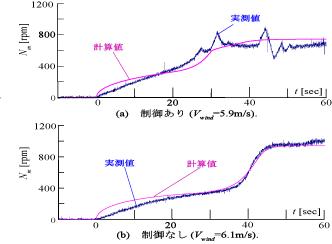
図3は提案する制御を有する発電装置の始動時におけるタービン回転速度の過渡応答を示したものである。制御の有無が及ぼす影響を検討するために、純抵抗を負荷に用いた場合の過渡応答も示しておく。
図(a)より制御を有する場合、制御なしの場合と比べて非常に素早く適切な回転速度になることがわかる。これは、風車始動時においても最適な負荷を与えることにより、高い出力係数を維持することが出来るためである。これに対し、図(b)の制御なしの場合は回転速度の立ち上がりも遅く、出力係数の最大となる回転速度(図の応答の場合780rpm)を超えてしまっていることがわかる。
以上より、最大電力追従制御は風車の始動時にも影響を及ぼすことが明らかとなった。
一般的に風力発電装置の効率をあらわす出力係数Cpは周速比λによって変化するため、風力発電装置の最大電力を追従するためには出力係数が最大値Cpmaxとなる最適な周速比λopを追従すればよい。これを実現するには風車の回転速度を調整する必要がある。そこで、本風力発電装置の最大電力追従制御法として、負荷電流調整による回転速度制御を採用することとした。これまでの検討よりλ=λopとなる最適な電機子電流の指令値Iarefは次式で表される。
図1. 昇降圧チョッパ回路を用いた制御回路
図3. システム始動時の過渡応答
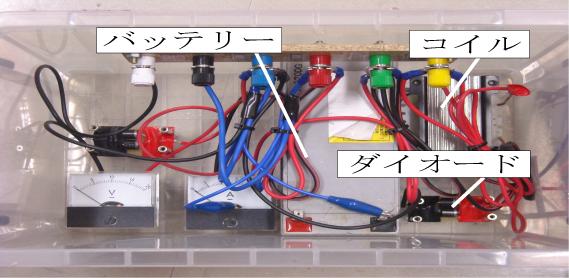
図2. 昇降圧チョッパ回路
本研究では、可変翼枚数風力発電装置に最大電力追従制御を用いることにより、高始動性、高効率で運転が可能であることが判明した。
しかしながら、本制御システムでは動作の不安定なところが見受けらるため、制御回路及びプログラムの改善を行っていく予定である。
実験結果を踏まえて試作一号機を製作した。
供試装置からの改善点として
・マグナス効果を増大させるために
ブレードを三本に増やし,
ブレードの径を大きくした。(図5)
・内部シャフトの損失をなくすために,
ブレード駆動用モータを防水加工し下部に配置した。